PolyU Digital Construction Laboratory
Experimental Apparatus
- Composite Robot (AGV payload 55kg, equipped with 32 Beams Lidar; Robot arm payload 10kg, 1m working area)
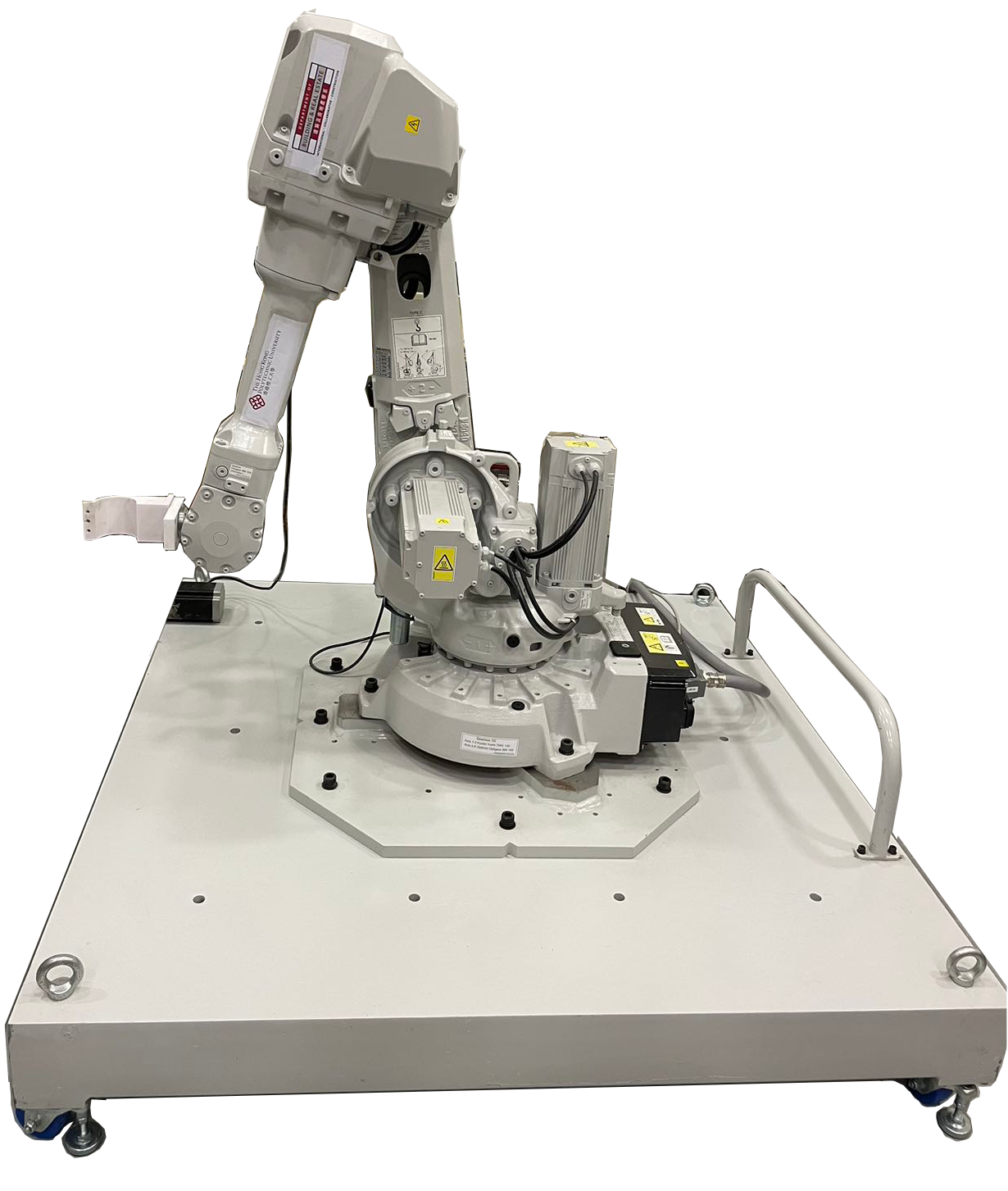
- Robot Arm with a ROS control platform (payload 12kg, 1.65m working area)
- NIR
- Scout Mini AGV
- Small-scale Robot
- Infra-red camera
- Apple Vision Pro
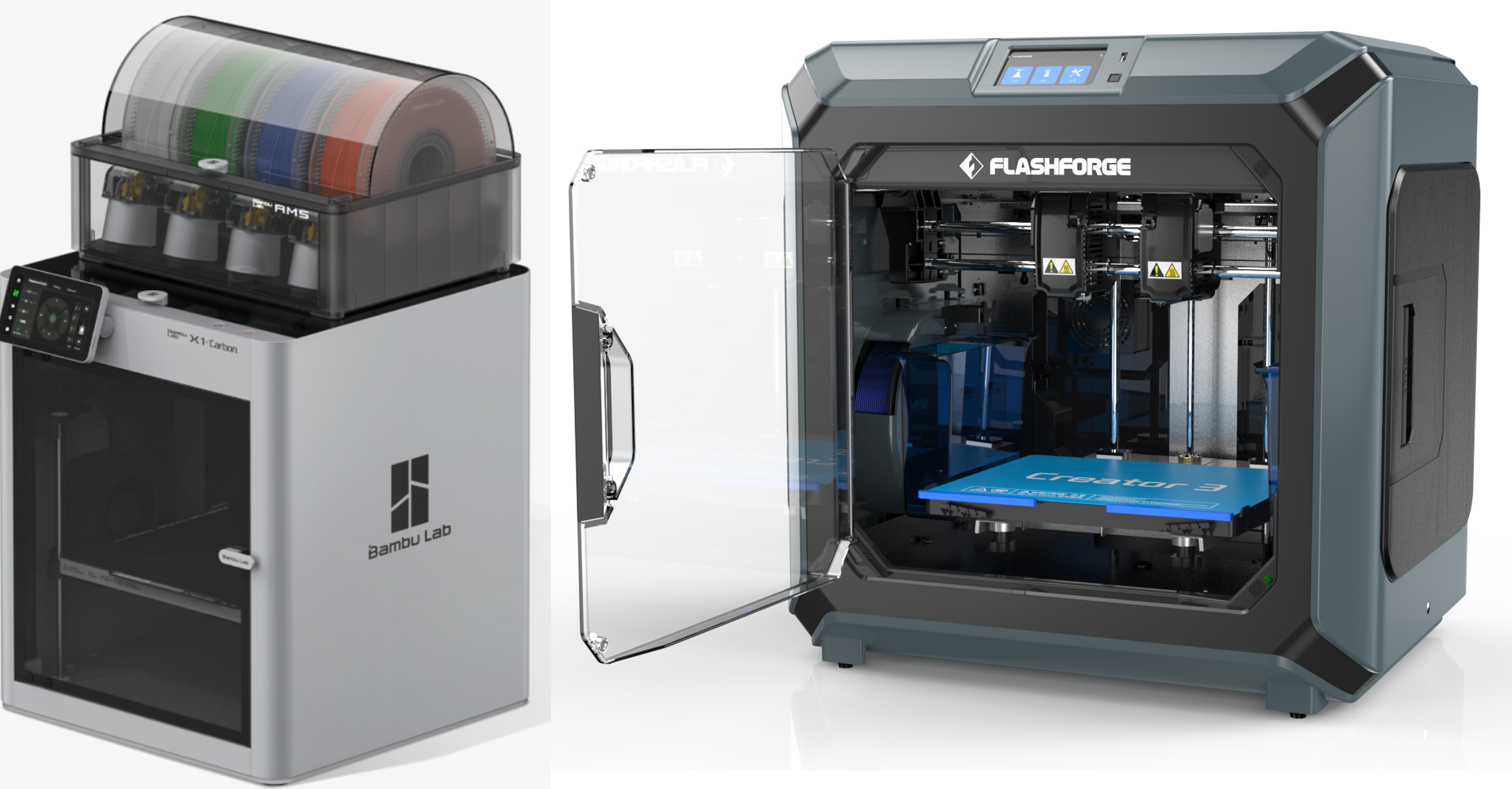
- Polymer 3D Printer
- Self-desgined and assembled Gantry Printer with the Klipper3D control system
- Concrete Pump
- Network F/T sensor
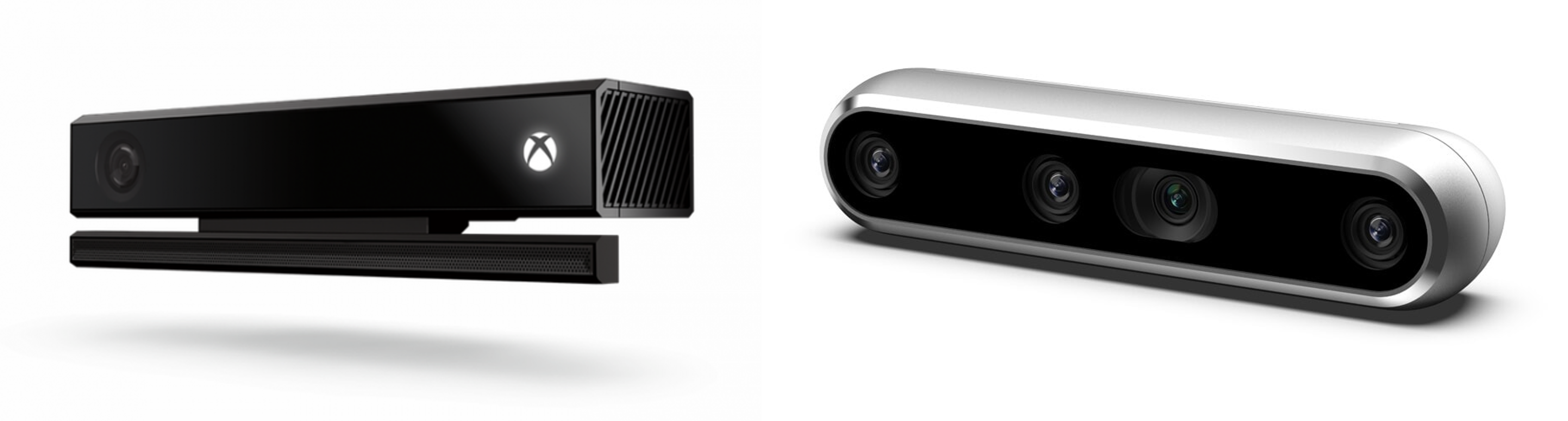
- Camera: Kinect 2 and RealSense
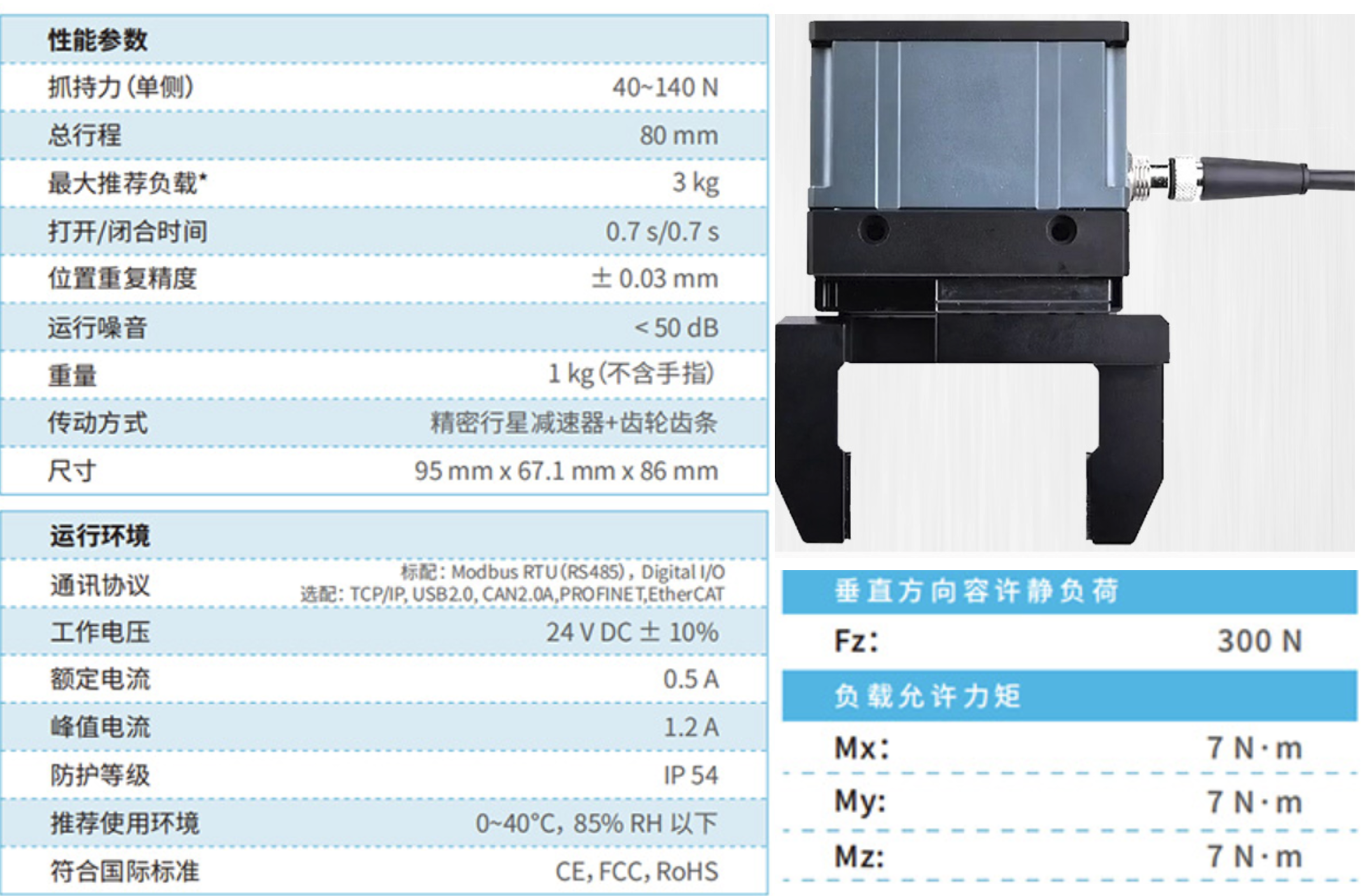
- Servo-electric gripper
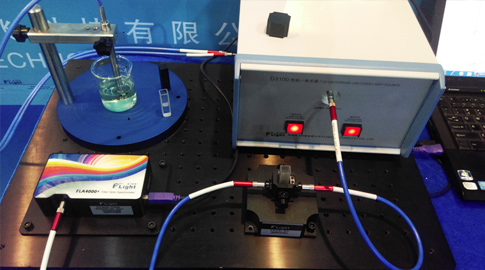
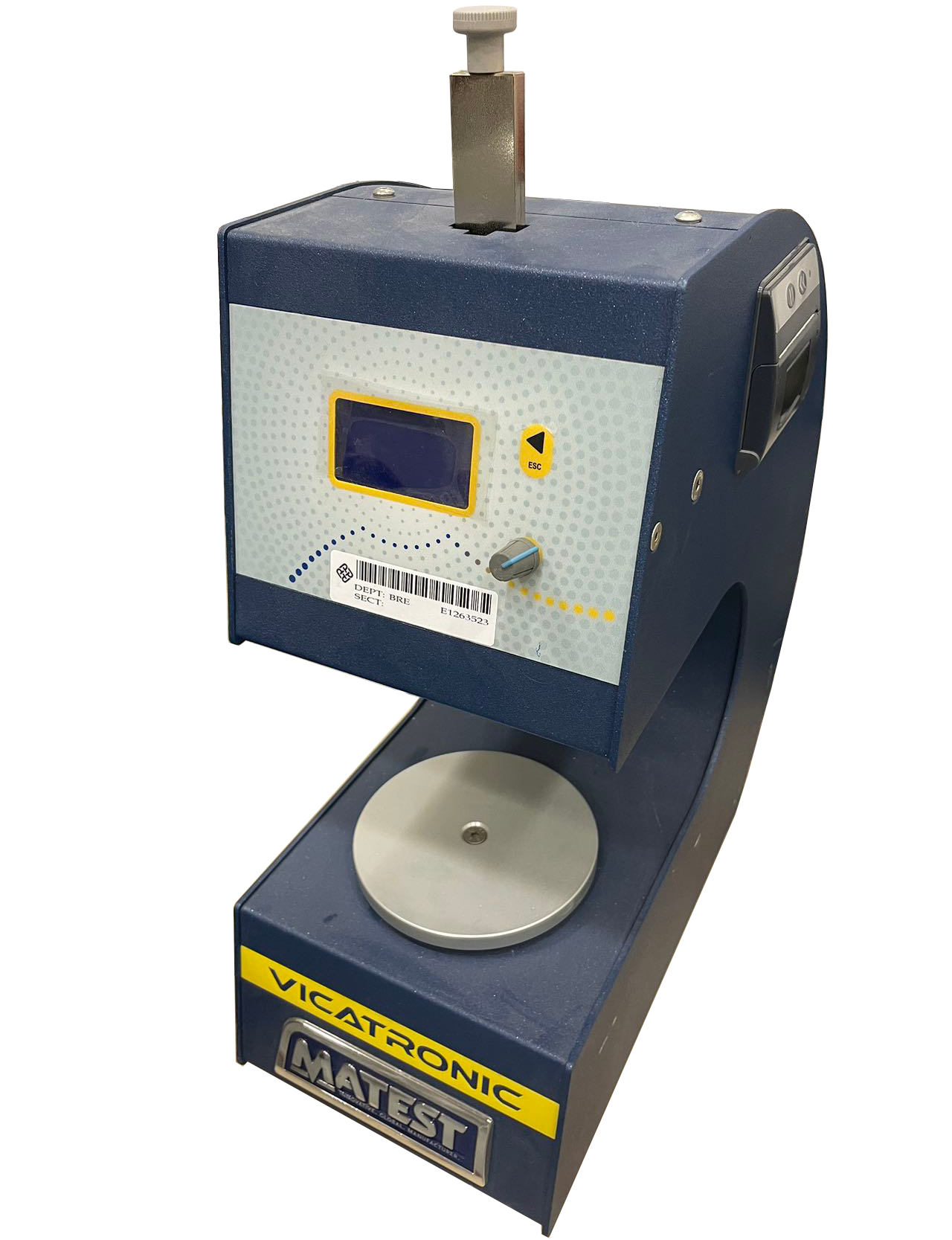
- Material Testing, Vicat
- Laser cutter: xtool p2 55w laser cutter
- Mechanical Testing